Autonomous Mapping:
-
Presented a high-level navigation algorithm on a 2-wheeled robot with a LiDAR scanner using RTAB-Map and ROS. GitHub YouTube
-
Created a gazebo world with unique identifiers to prevent RTAB-Map loop closures.
-
Tuned the move_base path planner to determine safe points for waypoint navigation.
-
Successfully solved the autonomous mapping problem and avoided obstacles for an extended time.
Waypoint Tracking:
-
Applied PID control to the turtlesim robot for waypoint tracking with the help of Python scripts in ROS. GitHub YouTube.
Balance Cart-pole system:
-
Balanced the pole of a cart pole system in the gazebo simulator with an LQR controller. GitHub YouTube

Simulation Result from Rviz
Simulation Result turtlesim window

Simulation Result from gazebo
PROJECTS
Autonomous Exploration Systems, ASU
-
Presented a supervisor agent that employs deep reinforcement learning to increase its speed on a multi-lane freeway, enhancing driver assistance systems. Report
-
Trained the RL agent with different reward structures in Python to observe the performance of the agent in the pygame window. GitHub
-
Created MATLAB scripts to plot the variation in average speed.
Simulation Result from pygame window
Reinforcement Learning for ADAS, ASU
Simulation of Robust Adaptive Control Algorithms, ASU
-
Implemented the gradient and least square parameter estimation algorithms (PEA) to the provided plant models.
-
Designed indirect adaptive controllers for the estimated plant models to achieve pole placement and LQG control objectives and incorporated dead-zone modification to improve robustness.
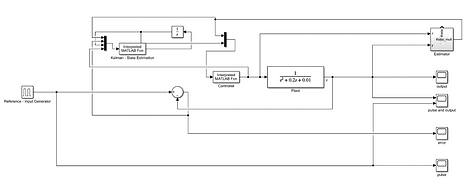
Simulink Block Diagram

Plot of Output and Input

Plot of Estimated Parameters
Simulation of Robust Adaptive Control Algorithms, ASU



