EXPERIENCE
Systems Design Engineering Intern
at Volvo Trucks North America, NC
May 2022 - Aug 2022
-
Worked with the Electrical Engineering & Vehicle Connectivity, Vehicle Engineering team of Group Trucks Technology at Volvo Trucks North America.
-
Vehicle Engineering is responsible for the integration and development of technologies into a complete truck for all brands within Volvo.
-
Developed a deep neural network-based regression model using Python packages such as Tensorflow, Keras, and Pandas to analyze databus truck data and predict dynamic response and system parameters.
-
Designed a PID controller for an innovative engine and braking control system and programmed the Raspberry Pi single-board computer to test the controller’s performance with a Volvo truck on the highway.
-
Examined the log files with Vector CANalyzer and observed a smooth speed reduction.
-
Supported software delivery and focus while working in a Scaled Agile Framework (SAFe) environment.
Aug 2021 - May 2023
Robotics Researcher, Autonomous Collective Systems Laboratory at ASU
Control Architecture

Driving Simulator utilizing CARLA
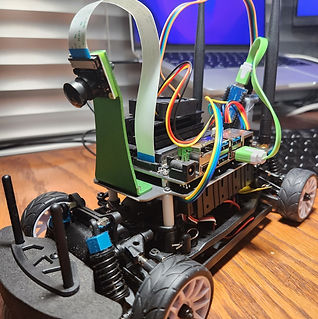
Modified Jetracer AI Pro Robot Car
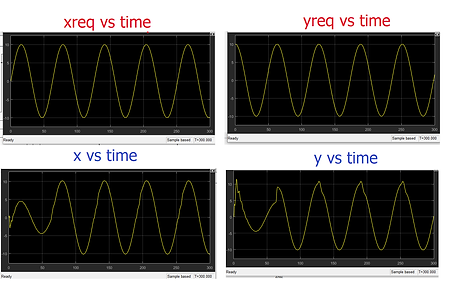
Position Coordinates of the Trajectory and Vehicle



Research Group at IIIT Delhi, India


Bee-bots: Final position
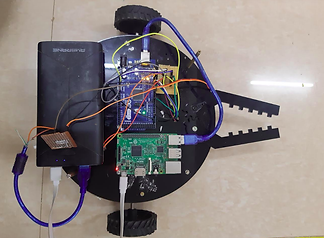
Bee-bot: Custom differential-drive robot with a robotic arm

Flowchart
Intern, Indian Institute of Science Education and Research Bhopal India
Jan 2021 - May 2021
-
Presented a Barrier Lyapunov Function (BLF) based non-linear controller design technique for trajectory tracking an underactuated AUV in a 3-D plane - bachelor’s thesis in collaboration with NIT Trichy and IISER Bhopal
-
Guaranteed that the tracking errors remain bound from the Lyapunov examination and software-in-the-loop simulations.
-
Secured "Starstruck" achievement from GitHub for creating a repository that has many stars. GitHub
Robotics Intern, National University of Singapore
Mar 2020 - May 2020
-
Simulated folding mechanisms of soft origami robots for pick-place action. Video
Intern, Indraprastha Institute of Information Technology Delhi(IIITD) India
May 2019 - July 2019
-
Derived the kinematics and dynamic equations of the motion of an underactuated AUV with 2-DOF in a 2-D plane.
-
Implemented the LQR optimal controller for the linearized model of the AUV to track the reference trajectory. GitHub
Robotics Researcher, Spider R&D Club, NIT Trichy India
Feb 2019 - May 2021
-
BEE-BOTS: A novel swarm robotic system; Achieved architectural decentralization, thereby enabling fault tolerance.
-
Published at the 2020 IEEE International Conference for Control, Automation, and Robotics (ICCAR). Paper
-
Integrated encoded motors, servo, and ultrasonic sensors and programmed the microcontrollers of the robots using Embedded C.
-
Fabricated the differential-drive robots of the swarm with 2-DOF robotic arms.
-
Secured "Arctic Code Vault Contributor" for contributing code to 2 repositories in the 2020 GitHub Archive Program. GitHub
CHARTOPOLIS: A Small-Scale Labor-art-ory for Research and Reflection on Autonomous Vehicles:
-
Accepted by the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop. Link
-
Developed the control architecture, including the human-robot interface, physical testbed, and driving simulator.
-
Modelled different driving scenarios using CARLA, Unreal Engine, and Mathworks RoadRunner.
-
Built C++ code to determine the rpm of the JetRacer Robot Car and publish sensor data through rosserial.
-
Mitigate the Sim2Real gap by allowing for a direct comparison of performance across the two environments.
-
Working for a global-security initiative project by ASU, titled "EAGER: Embodiment of Human Values Profiles in Autonomous Vehicles via Psychomimetic Controller Design", funded by the National Science Foundation (NSF).
-
Performed an extensive literature survey for motion planning of a platoon of autonomous vehicles to discuss the problem of minimizing energy consumption. Report
